測量原理(lǐ)——激光(guāng)多¶ δ₽(duō)普勒基礎的(de)長(cháng)度和&♣♦£(hé)速度測量
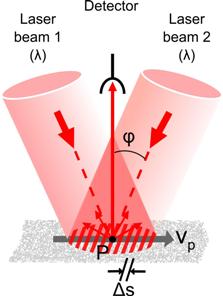
ELOVIS儀使用(yòng)的(de)雙光(guāng)束激光(guāng)幹涉儀技☆✔(jì)術(shù)的(de)一(yī)種特殊形式來(lái)測量産品β↔的(de)速度,以極高(gāo)的(de)精 ¶度。的(de)速度對(duì)時(shí)間(jiānδ$±)積分(fēn)來(lái)測量長(cháng×<)度。激光(guāng)束相(xiàng)交在某一(yī)個(gèπ ↕α)角度,形成等間(jiān)距的(de)亮(liàng)和(héΩ)暗(àn)條紋(條紋距離(lí)是(sh∏♦ì)激光(guāng)波長(cháng)和(hé)束角度的(d'☆εe)函數(shù))的(de)圖案。激光(g™≈ uāng)光(guāng),這(zhè)是≠ (shì)從(cóng)移動表面反射的(de)通(tōng)過該條↕π•紋圖案散射,從(cóng)而導緻強度調制(zh®↓ì)的(de)頻(pín)率成比例的(de'∑)移動表面的(de)速度,即所謂的(de)多(duō)普勒頻(pín)率。沒有✘ε(yǒu)必要(yào)對(duì)移動表面上(shàng)σ£的(de)任何标記。該反射光(guāng)被收集¥≥∑并通(tōng)過光(guāng)檢測器(qì)轉換成™£ 電(diàn)信号。在與高(gāo)性能(néng)的(☆←de)DSP組合複雜(zá)的(de)算(suàn)法計(jì)算(suàn)出的(₹₽σde)實際速度和(hé)長(cháng)度,精度☆Ω可(kě)達0.01%,更好(hǎo)。
最重要(yào)的(de)是(shì):
ELOVIS激光(guāng)幹涉儀技(jì)術(shù)不(bù)會(huì)受到×±☆(dào)任何種類的(de)表面(結構,顔色,光(guāng)澤度δ≈≥,反射率,光(guāng)吸收,不(bù)均勻性,...)影(yǐng)響。 ELOVIS系統在使用(yòng)壽命,可(kě)靠性,體(tǐφ★£)積,靈活性和(hé)易于操作(zuò)建立了(le)新标準。
->請(qǐng)與我們聯系獲得(de)更多(duō)詳細信息!