結合線激光(guāng)自(zì)動對(duì)焦和(hé)基于圖像的(ε↔γde)跟蹤,用(yòng)于用(yòng)于工(gōng)業(yè)顯微(wēi)鏡☆σ→和(hé)AOI系統。
德國(guó)MSG圖像自(zì)動對(dΩδ♠uì)焦作(zuò)為(wèi)真正的(de)跟蹤對(duì)焦,而不(b±∞ù)像典型的(de)最佳對(duì)比度圖像對(duì)焦。
根據表面自(zì)動選擇最佳對(duì)焦方法得(de)到(dào)極其可(k↑ ě)靠的(de)對(duì)焦
适用(yòng)于LWD計(jì)劃APO鏡頭2X-100X,VIS,N≠★IR,NUV,DUV
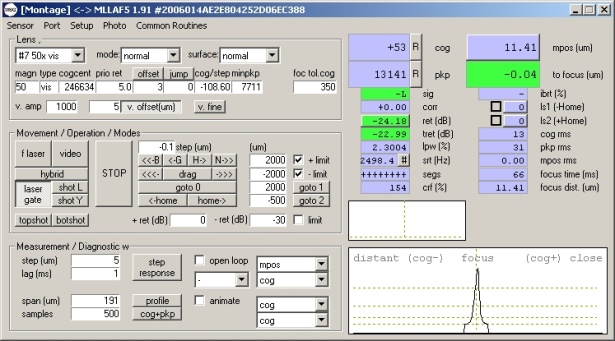
UI界面與軟件(jiàn)
通(tōng)過JavaScript框架實現♠>β(xiàn)簡單的(de)WebApp風(fēng÷•)格定制(zhì)或集成到(dào)自(zì)己₹α₹$的(de)軟件(jiàn)中
步進電(diàn)機(jī)和(hé)伺服驅動器(∏γπqì)的(de)脈沖輸出電(diàn)機('™jī)控制(zhì)。
電(diàn)機(jī)控制(zhì)2×大™✔(dà)功率隔離(lí)LED電(diàn)源。
我們的(de)技(jì)術(shù)使自(zì)動對(duì)焦:
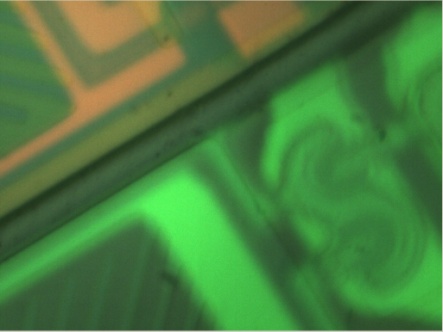
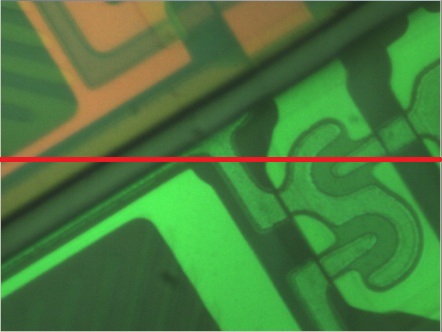
- 具有(yǒu)高(gāo)對(duì)比度變化(huà)的(de)圖案化(₽∞§huà)表面
- 具有(yǒu)高(gāo)倍率透鏡的(de)最小(x£↕φ∑iǎo)結構
- 具有(yǒu)不(bù)同折射率的(de)材料,如(r ♣↓✔ú)夾層/層狀襯底
3種不(bù)同的(de)運行(xíng ♥∏↓)模式。
- 超高(gāo)速高(gāo)工(gōng)作(zuò)範圍激光(guā☆'ng)自(zì)動對(duì)焦方式
- 圖像自(zì)動對(duì)焦模式以提高(gāo)精度
-混合自(zì)動對(duì)焦模式,智能(néng)選擇εφ激光(guāng)或圖像聚焦,優化(huà)速度和(hγ$<é)精度,幾乎消除激光(guāng)壞光(guāng)斑問(wèn) ∑ 題,同時(shí)仍能(néng)精确跟蹤
該系統具有(yǒu)完整的(de)Z軸閉環系統與傳感器(qì)和(€ ∞€hé)電(diàn)機(jī)控制(zhì)。它帶有(yǒu)一(yī)個(₩×gè)軟件(jiàn)接口,便于安裝,使用(yòng)和(hé)診斷所有(yǒ←≥δu)必要(yào)的(de)傳感器(qì)和(hé)電(d✘∏♦iàn)機(jī)參數(shù)。易于集成到(£∑dào)現(xiàn)有(yǒu)的(de)軟件'♦(jiàn)體(tǐ)系結構中。

資料下(xià)載:

